
18487.1還包括了一個比較復雜的時序圖和時序表, 搞透這個圖和表需要點耐心,不過,整體來說搞透這個附錄B并不難,但最好能和《GB/T 27930-2015:電動汽車非車載傳導式充電機與電池管理系統之間的通信協議》附錄A(下文簡稱“附錄A”)結合起來研究。附錄A由一系列的充電時序流程圖組成,讀透這個需要的可能不僅僅是耐心了。筆者估計全國只有幾十個工程師真的讀透這個了——可能只是做充電樁控制器的軟件工程師為了寫代碼才認真仔細地讀透。甚至有些專門做充電樁控制器的廠商只是具備嵌入式系統開發的能力的廠家, 并沒有真正做充電樁,沒有很好地理解標準,做出的控制器不能實現真正的商用。
在筆者看來,讀透附錄B是對從事充電樁研發的工程師最最基本的要求,讀透了附錄B之后,再讀一讀27930的正文,了解各種報文的分類和含義,更進一步,在遇到可能協議相關的問題時啃啃27903的附錄A。
本文及隨后幾周的文字可以算是學習筆記,筆者試著將閱讀這兩個標準的一些思考分享出來。
附錄B的圖B.1給出了直流充電的基本方案示意圖,如下圖所示,最左邊大實線方框上方標識有“非車載充電機”,也就是直流充電樁; 中間的大實線方框上方寫著“車輛接口”,實際產品形態是充電搶的槍頭部分和充電槍插座部分,兩者中間用虛線示意; 最右邊大實線方框表示電動汽車。
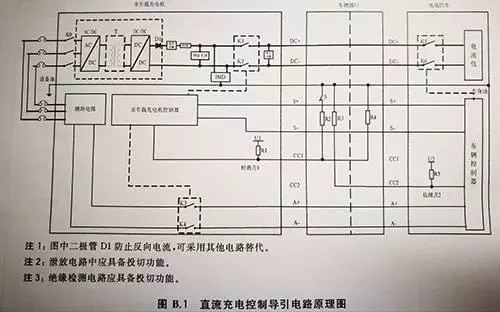
圖中輔助電源的示意圖是值得商榷的:一方面它沒有畫出二次供電的輔助電源,譬如充電樁控制器,絕緣檢測電路,電壓和電流檢測,顯示屏和直流電表等所需的輔助電源,另外一方面,圖中單獨提供給電動汽車的電源是從三相電輸入,在實際產品中一般是從三相電中取其中的一相和另外的中線N給輔助電源供電。
18487.1的問題點1:
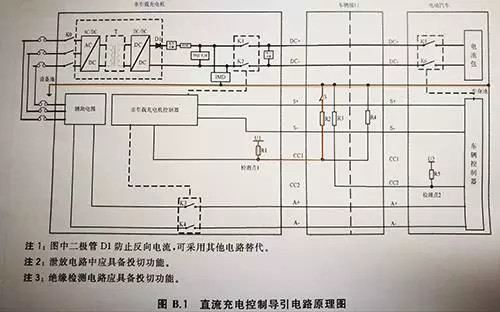
圖中是“車輛控制器”即汽車行業常說的VCU是否就是27930標準中的BMS? 只是兩個標準的表述一致? 還是說:早期和當前的電動汽車方案設計上, 有的廠商用VCU實現物理連接確認,連接確認之后發送使能信號給BMS,BMS再啟動和充電樁的握手? 筆者和多家充電樁和電動汽車廠商人員討論,說法不一。
下面將詳細說明充電過程中硬件和軟件分別執行了哪些動作,實現了哪些功能。
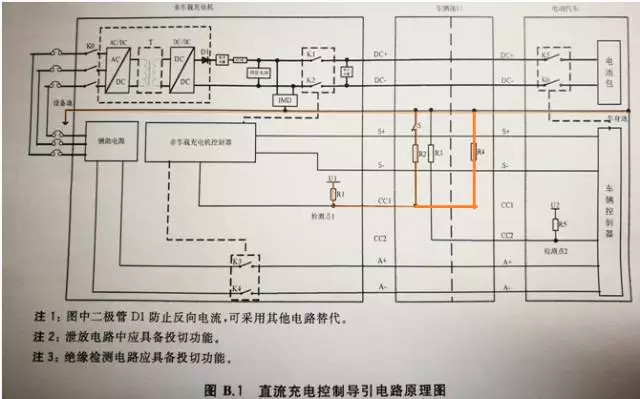
圖中的檢測點1實際上是充電樁控制器里面的A/D采樣口。將機械鎖開關S按住后,檢測點1檢測到的電壓從6V變成12V,如下圖紅色標識出檢測點1的檢測回路,U1是12V電壓,經過電阻R1和R2串聯之后在檢測點1分壓得到的電壓是6V。S斷開之后檢測點1的電壓是12V。圖中的R1,R2,R3,R4,R5都是1K歐,充電槍插入電動汽車后,“車身地”和充電樁的“設備地”共地。
此時,檢測點電壓從12V變成了6V。上圖中的R4被接入檢測回路,這時的S仍然是常開的,U1的12V電壓經過R1和R4分壓,檢測點1電壓為6V。檢測點2的電壓此時是多少?
18487.1的問題點2:
檢測點2的電壓此時是否就從12V變成6V? 還是在K3、K4閉合、充電樁上面的輔助電源給車輛控制器(或BMS)供電之后,檢測點2才能工作? 不管怎樣,這只是簡單的先后次序以及物理連接確認是VCU實現還是BMS實現的問題。
圖中U2是12V,充電槍和車輛連接后, U2經過R5和R3分壓之后,檢測點2電壓由此前的12V變成了6V。
如下圖所示,R2和R4并聯,再和R1串聯,U1經過1K歐和0.5K歐的分壓之后,在檢測點1的電壓就從6V變成了4V。
U2應為U1,檢測點2為檢測點1。
至此,物理連接完成。
判斷檢測點1的電壓是否為4V。如果是4V,通過充電樁控制器的I/O輸出信號控制輔助電源,給電子鎖供電,電子鎖被供電之后,電子鎖內部的繼電器吸合,鎖止充電槍并給出反饋信號給充電樁控制器的I/O輸入,充電樁控制器根據該I/O輸入信號來判斷電子鎖是否鎖止。
還是和問題點1和2有關,如果圖B.1中的U2是由充電樁上的這個輔助電源提供的,那么問題點3來了。
18487.1的問題點3:
在Pg.39的表B.2 直流充電控制時序表中指出T0-T2,檢測點2的電壓從12V→6V,到了T3才閉合K3、K4。如果標準中的這個描述是正確的,反過來說明檢測點2的電壓U2不是由圖B.2中的輔助電源提供的。 那么可能的做法就是:檢測點2是做到VCU里面的,VCU的U2是車輛上常電提供的,樁和車確認了物理連接之后,K3、K4閉合,BMS開始工作,VCU和BMS之間通訊。 或者U2由常電提供,然后切回到輔助電源供電。圖中的車輛控制器就是BMS。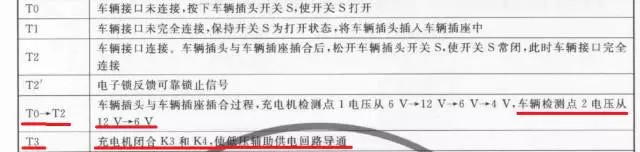
上面三個問題點3其實是一個問題。
在18487.1的Pg.35的文字說明(拷屏如下),似乎否認了表格中的描述。VCU的功能就是BMS實現的。上述表格只是個筆誤? 車輛檢測點2電壓從12V→6V應該刪除,移到T3這一行,這一行文字改為:充電機閉合K3和K4,使低壓輔助供電回路導通,車輛檢測2檢測到電壓為6V。
總之,從T0到T3完成了物理連接和低壓輔助上電。在這過程中,硬件上,機械鎖S和電子鎖鎖止,開關K3、K4閉合,軟件上充電樁控制器做出判斷,控制電子鎖的動作,控制K3、K4的閉合。 當然,軟件上的功能需要充電樁控制器的A/D和I/O硬件作為載體實現。





